LMEC-7 Pohlin heiluri
LMEC-7Pohlin heiluri
Kokeet
1. Vapaa värähtely – tasapainopyörän amplitudin θ ja vapaan värähtelyn jakson T välisen vastaavuuden mittaus
2. Vaimennuskertoimen β määritys.
3. Pakotettujen värähtelyjen amplitudi-taajuus-ominaiskäyrän ja vaihe-taajuus-ominaiskäyrän määritys.
4. Erilaisten vaimennusten vaikutuksen tutkiminen pakotettuihin värähtelyihin ja resonanssi-ilmiöiden havainnointi.
5. Opi käyttämään stroboskooppista menetelmää tiettyjen liikkuvien kohteiden määrien, kuten vaihe-erojen, määrittämiseen.
Tärkeimmät tekniset tiedot
| Jousen sitkeyskerroin K | alle 2 % muutos vapaassa värähtelyjaksossa |
| Ajan mittaus | tarkkuus 0,001 s, syklin mittausvirhe 0,2 % |
| Mekaaninen heiluri | indeksointiurilla, indeksointi 2°, säde 100 mm |
| Amplitudin mittaus | virhe ±1° |
| Valosähköinen anturi A | kaksoisvalosähköisten signaalien havaitseminen |
| valokenno B | yksittäisten valosähköisten signaalien havaitseminen |
| Moottorin nopeusalue (pakotetaajuus) | 30–45 rpm ja portaattomasti säädettävissä |
| Moottorin nopeuden epävakaus | alle 0,05 %, mikä varmistaa vakaan testisyklin |
| Järjestelmän vaimennus | alle 2° amplitudin heikkenemistä kohden |
Tiedot
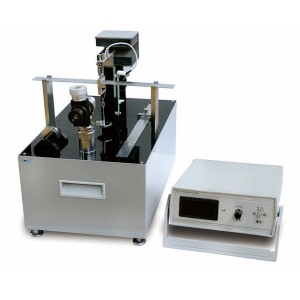
Järjestelmän komponentit: Pohl-resonanssikoelaite, Pohl-resonanssikoeohjain, erillinen salamalaite, 2 valokennoa (yksi kumpaakin tyyppiä A ja yksi tyyppiä B)
Pohl-resonanssin kokeellinen järjestely.
1. Jousen sitkeyskerroin K: alle 2 %:n muutos vapaassa värähtelyjaksossa.
2. Ajan mittaus (10 sykliä): tarkkuus 0,001 s, syklin mittausvirhe 0,2 %.
3. Järjestelmän vaimennus ilman sähkömagneettista vaimennusta: alle 2° amplitudin heikkenemistä kohden.
4. Mekaaninen heiluri: indeksointiurilla, indeksointi 2°, säde 100 mm.
5. Amplitudimittaus: virhe ±1°; amplitudimittausmenetelmä: fotoelektrinen havaitseminen.
6. Valosähköinen anturi A: kaksoisvalosähköisten signaalien tunnistus; valosähköinen anturi B: yksittäisten valosähköisten signaalien tunnistus.
7. Moottorin nopeusalue (pakotetaajuus): 30–45 rpm ja portaattomasti säädettävissä.
8. Moottorin nopeuden epävakaus: alle 0,05 %, mikä varmistaa vakaan testisyklin.
9. Vaihe-eron määritys.
Kaksi vaihe-eron määritysmenetelmää: stroboskooppinen ja metrologinen, joiden välinen poikkeama on alle 3°.
Metrologisen menetelmän mittausalue on 50° ja 160° välillä.
Stroboskooppinen mittausalue 0° ja 180° välillä; toistuvien mittausten poikkeama <2°.
10. Salama: matalajännitteinen käyttö, koeyksiköstä erillinen salama, 2 ms jatkuva salama-aika, väri silmiinpistävä punainen.
11. Hiljainen, ei häiriöitä tai epämukavuutta ryhmäkokeiden aikana.
Pohl-resonanssin kokeellinen ohjain.
1. Tiedon keräämiseen ja näyttämiseen käytetään erityistä kokeellista ohjainta; käytetään suurta pistematriisi-LCD-näyttöä, jossa on valikot kokeen ohjaamiseksi, huomautukset (sähköinen käyttöohje) sekä kokeellisten tietojen näyttämiseksi ja tarkistamiseksi.
2. Erillinen ohjausliitäntä salamoille.